Particle Filter Simulation
Particle Filter
I. Introduction
大二买了一本 Probability Robotics(of Sebastian Thrun, et al),其中粒子滤波的概率论知识讲得很清楚。大二学完概率论之后给我看明白了,人生第一次在理论学习上那么有成就感。但是看完之后总觉得干巴巴的,不知道如何应用。最近写完了 Volume2D Shader,突然想到一个很好的方法可以应用粒子滤波,于是实现了一版。半天写完,效果不错,见[Github Repo🔗:Enigmatisms/ParticleFilter]:
II. 理论推导
2.1 目标
我仅仅讨论粒子滤波在localization中的作用,虽然localization只是PF理论应用的一个小方向。如果没有给定初值,也没有很好地利用观测信息,localization基本就是在乱猜其在空间中的位置。并且,通常情况下,只使用当前scan也无法准确获得定位,因为可能存在大量的重复地图特征。
好在我们有连续的观测以及连续的控制,假设控制与观测序列:
- 控制序列: \(U_t:\{u_1,u_2,...u_{t}\}\),\(u_t\)表示从状态\(x_{t-1}\)过渡到\(x_t\)的控制
- 观测序列:\(Z_t:\{z_0,z_1,....z_{t}\}\),\(z_t\)表示在状态\(x_t\)下的观测
我们不希求通过\(z_t\)来求使得\(P(x_t|z_t)\)最大的\(x_t\),而是需要求: \[ \begin{equation}\label{post} x_t^* = \mathop{\arg \max}_{x_t}P(x_t|Z_t,U_t) \end{equation} \] 实际上,可以说公式\(\eqref{post}\)定义的是一个后验概率。也就是最大化一个后验概率了,啊这不就是 贝叶斯滤波吗?确实,粒子滤波就是贝叶斯滤波的一个非参数实现。
但是一般来说,没有马尔可夫假设,事情会变得很复杂,如果我们需要对一大串控制 / 状态序列进行处理,应该怎么做?
2.2 粒子与采样
这是不是自然计算?粒子是一个个的可能状态:\(x_{t,1},x_{t,2},...x_{t,k}\),假设我们有k个假设的状态。此时我们应该运用贝叶斯学派知识,首先由信息包含关系(之前的观测与控制包含在状态\(x_{t-1,i}\)中) \[ \begin{equation}\label{info} P(x_{t,i}|Z_t,U_t,x_{0,i})=P(x_{t,i}|z_t,u_t,x_{t-1,i}) \end{equation} \] 接下来的贝叶斯滤波变换可以说很妙了: \[ \begin{equation} P(x_{t,i}|z_t,u_t,x_{t-1,i}) = \frac{P(x_{t,i}, z_t,u_t,x_{t-1,i})}{P(z_t,u_t,x_{t-1,i})} \end{equation} \] 既然是要使用贝叶斯,那么就要想办法把观测和状态互换位置: \[ \begin{equation}\label{eqn4} \frac{P(x_{t,i}, z_t,u_t,x_{t-1,i})}{P(z_t,u_t,x_{t-1,i})}=\frac{P(z_t|x_{t,i},u_t,x_{t-1,i})P(x_{t,i},u_t,x_{t-1,i})}{P(z_t|u_t,x_{t-1,i})P(x_{t-1,i},u_t)} =\frac{P(z_t|x_{t,i},u_t,x_{t-1,i})P(x_{t,i}|u_t,x_{t-1,i})}{P(z_t|u_t,x_{t-1,i})} \end{equation} \] 注意,我们有如下两个论断成立: \[ \begin{align} & P(z_t|x_{t,i},u_t,x_{t-1,i}) = P(z_t|x_{t,i})\label{within} \\ & P(x_{t,i}|u_t,x_{t-1,i}) \text{ is a known prior}\label{prior} \end{align} \] 公式\(\eqref{within}\)说的是:观测\(z_t\)只与当前状态\(x_t\)有关。论断\(\eqref{prior}\)指的是,由控制引起的状态转移误差分布是已知的(比如本实现中,我假设我的控制噪声是白噪声,那么此处就是一个高斯项)。
那么公式\(\eqref{eqn4}\)可以被进一步化简为下式,其中\(\eta\)是我们不关心的归一化因子。 \[ \begin{equation}\label{eqn7} \eta P(z_t|x_{t,i})P(x_{t,i}|u_t,x_{t-1,i}) \end{equation} \] 那么可以这么理解:状态粒子i在第t时刻的观测\(z_t\)下,拥有状态\(x_{t,i}\)的概率为\(\eqref{eqn7}\),包含两个组份:
- 状态粒子与观测的契合程度(给定状态能生成对应观测吗)\(P(z_t|x_{t,i})\)
- 控制状态转移噪声先验\(P(x_{t,i}|u_t,x_{t-1,i})\)
在2.5小节里,我简单地说一下我是如何对这个问题进行建模的。
2.3 分布变换
粒子滤波实际上是用粒子与采样来近似任意分布,在公式\(\eqref{eqn7}\)中,已经说明了\(P(x_{t,i}|x_{t-1,i},z_t,u_t)\)的组成成分。粒子滤波实际上还做了一个这样的事情,我们知道概率论中,概率是需要归一化的,而归一化因子在连续PDF中一般都涉及到积分。很多时候,积分是很难的,不一定能积出来。要获取目标分布,就存在一定难度了。这个时候,粒子滤波可以通过一个简单的建议分布,去推导一个复杂的目标分布。
我们重新定义一下问题。\(P(x_{t,i}|x_{t-1,i},z_t,u_t)\)是当前点的存在置信度,而我们希望,算法可以是迭代式(马尔可夫)的,也就是要从上一个迭代的粒子对应的置信度,计算本次迭代对应粒子的置信度。于是根据控制状态转移分布,可以得到建议分布: \[ P(x_{t,i}|x_{t-1,i},z_t,u_t)=P(x_{t,i}|x_{t-1,i},u_t)P(x_{t-1,i}|x_{t-2,i},z_{t-1},u_{t-1}) \] 可以发现,等号右边第二项就是上一次迭代对应粒子的分布。根据状态转移进行了分布变换,得到了新的建议分布。但是我们并非直接接受新的建议分布,为什么?
状态的转移带来新的信息。通俗地说,到一个新的地点,就可以从不同的角度观察环境。
我们可以通过新的观测,来衡量,这些新的点是否适合?原来的粒子,是分布的采样。那么,符合新的观测的粒子,自然可以给一个大权重,而不符合新观测的粒子,自然也就不那么重视。这就涉及到对粒子进行加权以及重采样。
2.4 加权 重采样
我们希望给粒子impose一个权重。但是粒子已经是分布的一个例化了(采样),这个时候有两种方案:
- 每个粒子维护一个权重,每次更新权重
- 每次重新生成一群粒子,根据权重进行生成
第一种思想很好理解。比如在localization问题中,我在位姿空间中有很多位姿的估计粒子,那么最后粒子求加权平均应该就是结果。
而第二种思想,则是把权重隐含在粒子数量中,这种思想是真正符合“粒子是对应分布的采样”的。显然,在N维空间中某个区域粒子数多,自然此处分布就应该比较大。
直接进行随机的Metropolis-Hasting采样,需要的时间开销比较大?为什么?根据这篇文章[2],里面说:
简单随机重采样:(1)生成N个均匀分布随机数(2)随机数数列排序(3)根据随机数数列以及粒子的权重进行重采样。
这个步骤是:设点i的权重是\(w_i\),生成的随机数数列是\(y_i\)。则对于所有的\(y_i\),如果\(y_i\)落在\(\left(\sum_{k=1}^iw_k,\sum_{k=1}^{i+1}w_k\right]\)中,那么对应粒子的采样数+1。可知这样的采样方法,复杂度是\(O(NlogN)\),毕竟需要排序,但是这是完全随机的。完全随机的两个坏处就体现出来了:
- 不能保证数据集的遍历性,有些数据可能根本没有办法被采样到
- 计算复杂度大,大型采样时间消耗大。
更好的算法,这里就不再赘述了,详见《概率机器人》第四章。我的实现中,使用的就是《概率机器人》中的“低方差采样”,时间复杂度为O(N),并且是遍历性的。
重采样的目的就是使得建议分布转化为目标分布。对于粒子滤波,如果我们这样理解问题:滤波的完整迭代过程(从0到收敛有t个迭代),那么希望最大化: \[ \begin{equation}\label{new_obj} P(x_{0:t,i}|z_{1:t},u_{1:t}) \end{equation} \] 以localization任务来说。如果一个状态是比较正确的,那么不管如何迭代,其置信度在不同的迭代中都应该比较大。那么根据公式\(\eqref{eqn7}\),可以展开为类似的结构(这是目标分布): \[ \begin{equation}\label{eqn11} \eta P(z_t|x_{0:t,i}, z_{1:t},u_{1:t})P(x_{0:t,i}|u_t,z_{1:t-1,i}) \end{equation} \] 进一步根据贝叶斯和马尔可夫性,可以作进一步展开,可得到建议分布与目标分布之比与\(P(z_t|x_{t_i})\)成正比。
2.5 简单建模
此部分,我简要介绍一下在基于Volume2D Shader的激光雷达模拟器中,如何建模一些分布。最为重要的首先就是似然\(P(z_t|x_t)\),也即,给定状态下,产生观测\(z_t\)的可能性。此处我将其建模为:
- 给定\(x_t\)(状态,也即粒子对应的位姿),我在此处模拟一个激光点云(因为已知地图),与实际的观测\(z_t\)进行比较。相似则对应的概率大,不相似则概率小。
- 那么相似性的比较,则是基于模拟激光点云对应角度上的range差值。其实只要理解似然在此处的作用,这个模型很好建立。
另一方面,是状态转移模型。此处直接使用了一个方差与移动大小相关的高斯噪声。
III. 结果
 |
 |
|---|---|
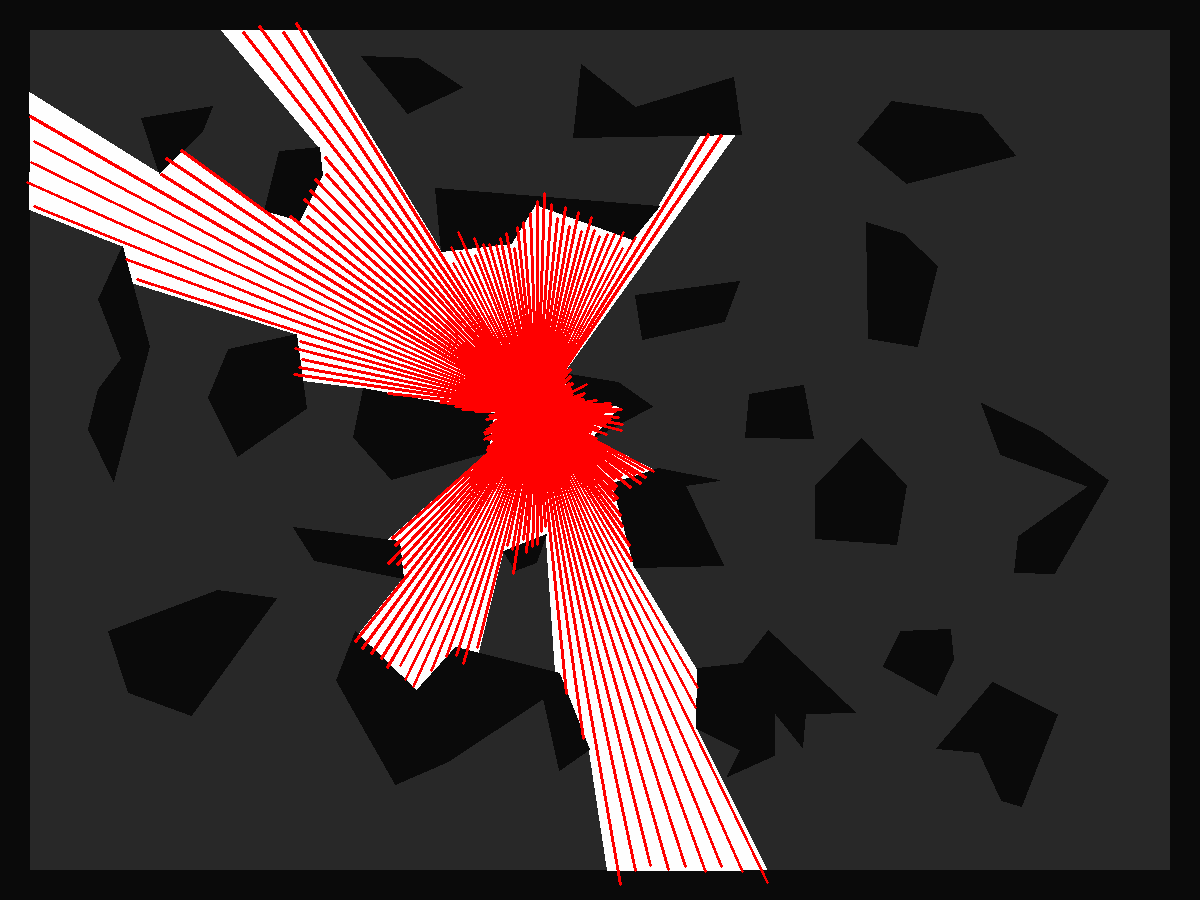
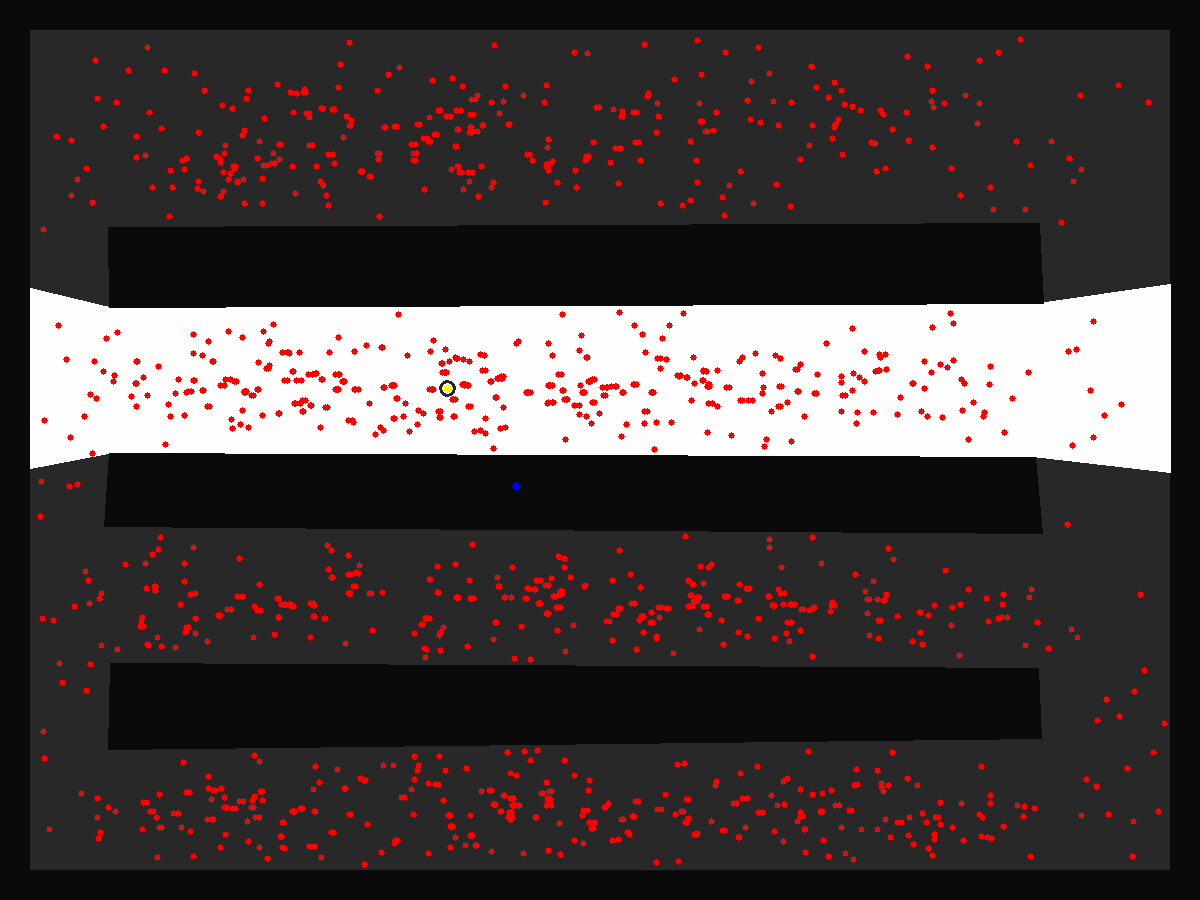
| 长走廊问题 初始化 | 长走廊问题 第三次迭代(移动3次) |
 |
 |
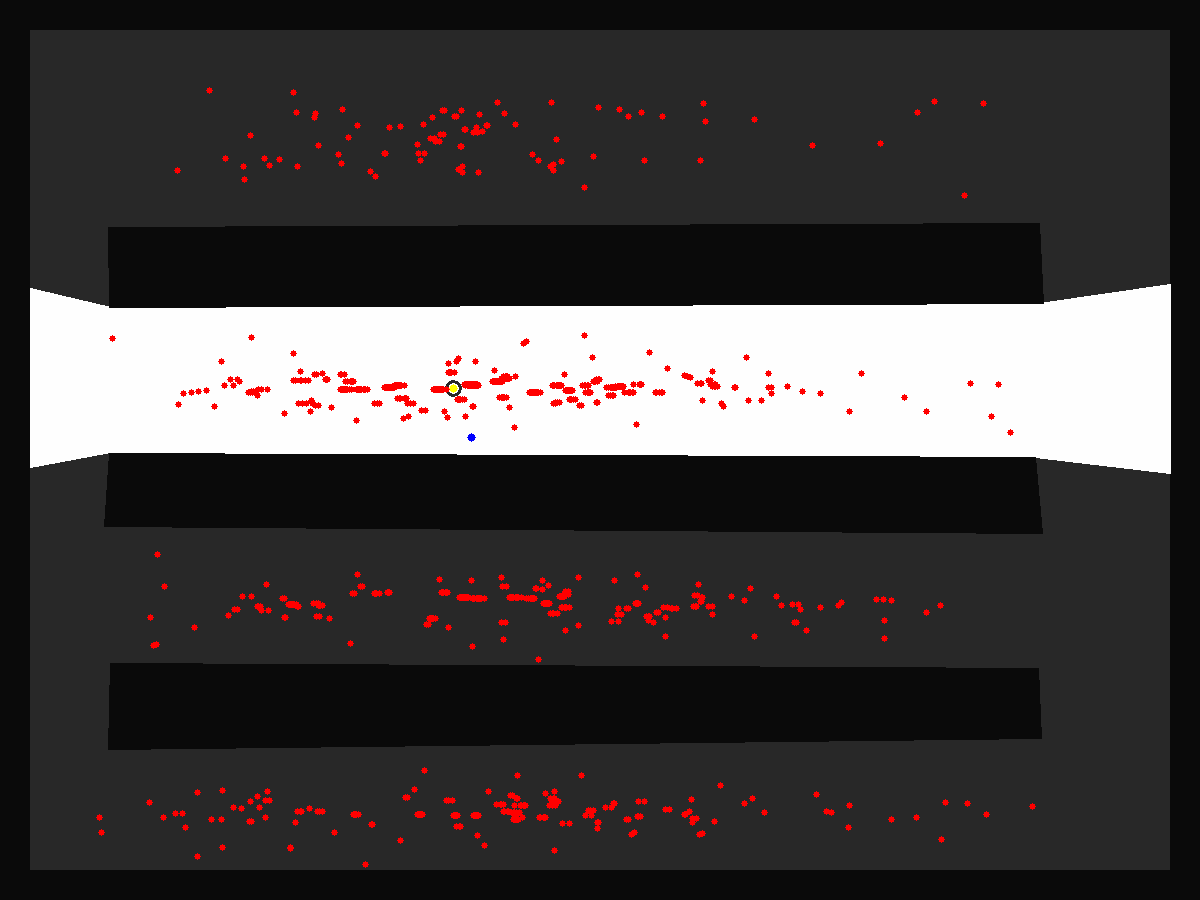
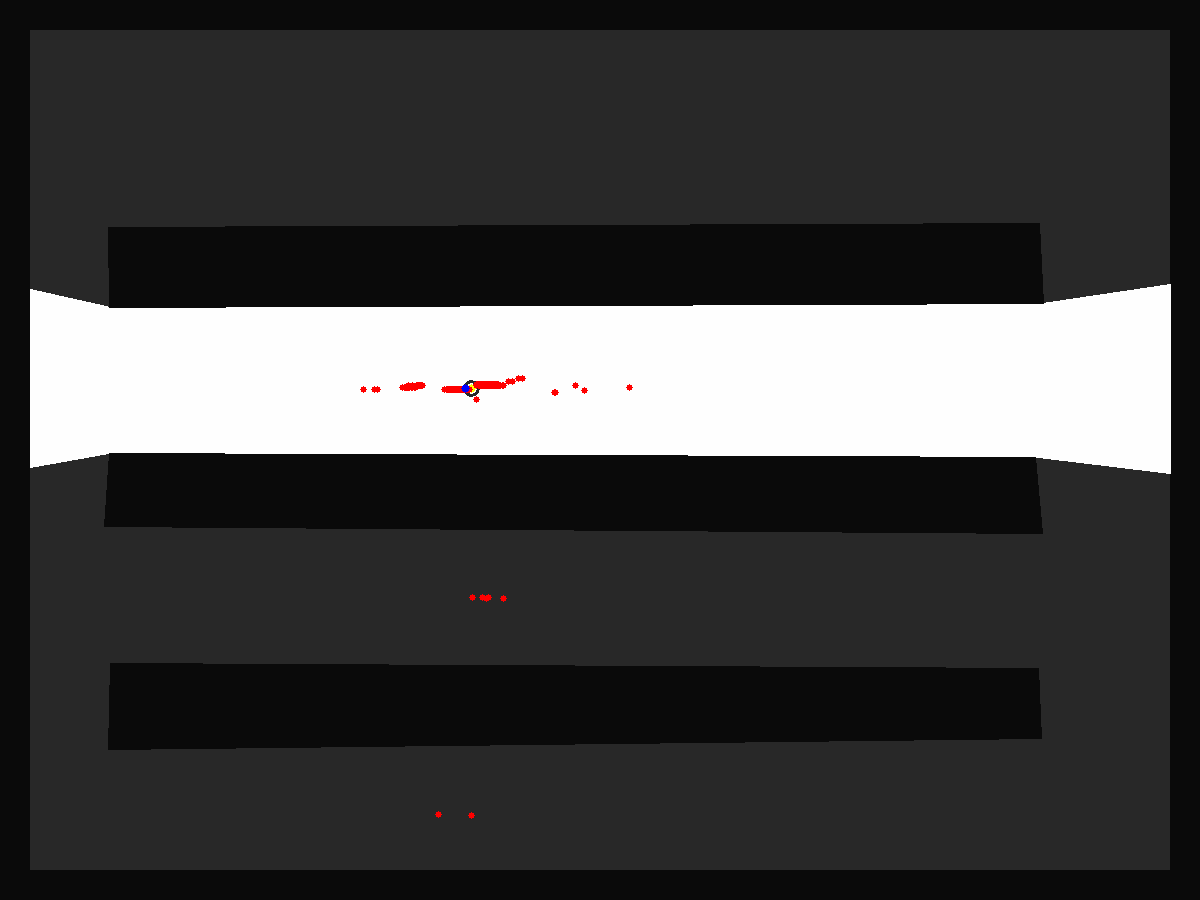
| 长走廊问题 第九次迭代(移动9次) | 长走廊问题 第十六次迭代(移动16次) |
对于不完全的长走廊问题(虽然相似但是还有一定区别的环境),粒子滤波还是可以应对的。(2000个粒子)。
Reference
[1] Probability Robotics (Sebastian Thrun, et al)
[2] 粒子滤波常用重采样算法分析比较,范澎湃等