骷髅融合者-CVPR2021
骷髅融合者
I. Intros
想看看CVPR2021上都有关于点云配准或者点云处理都有什么样的文章,网上搜刮了几篇,骷髅融合者就是其中一篇。这篇论文的作者貌似是上海交大的本科生,嗯 本科CVPR一作,卢策吾老师团队,可以说是很nb了。本论文提出的思想,个人认为比较简单(可能是因为比较复杂的部分被PointNet++掩盖了,文中也没有使用时下最为流行的【变形金刚】)。并且看完Introduction之后,我就觉得这个思想好像在哪里见过:嗷,原来是我的灯条检测中含有这个方法的弱弱化版。
本短篇博客只做该论文的一个简单分析,并不附带复现(如果要带复现的话,一是需要时间,二是需要了解PointNet++)。论文的地址是:arXiv: Skeleton Merger: an Unsupervised Aligned Keypoint Detector
II. 论文思想
2.1 思想概述
作者使用了一种“重构误差”的思想,使用一个更简单的表征,来重构一个点云,使得原始点云与生成的点云在某个metric下最为相似。而我在RM时做的工作:无监督优化算法的灯条检测,也是类似:
- 找两个key points(灯条的端点),使用灯条的端点根据hand-crafted重构方法,重构出灯条,使得生成的灯条与原始灯条图像的L2差距最小。(所以可以说,我大二下学期写的这个算法是本论文的弱弱化)
本文的思想大概可以被总结如下:
本文不涉及任何网络结构以及网络设计,只是分析一下:
- 其方法有哪些亮点
- 个人认为其方法可能存在哪些不足
2.2 亮点
本人认为,此论文突出的两个亮点就是:
- skeleton重构误差
- CCD误差函数的设计
首先,通过skeleton重建点云,来辅助判定key points的选取效果,可以使得其达到无监督的目的。在MoCo论文分析中,实际上已经说过,无监督的loss也就主要是那么两种(据我目前所知的“主要”):
- 对比loss(以MoCo为代表的),主动生成匹配与不匹配的样本,最大化不同类别特征之间的差别
- 生成式loss(autoencoder思想),主要思想是:学出来的特征能够经过某种方式重构输入,特征学得越好,从直觉上来说,重构效果越好。
第二种方法的显著问题就是:一般会有比较大的计算开销(特别是重构图像时,长采样、反卷积结构等等)。个人感觉,本文是一种生成式的loss,但是由于:(1)key points(对应的边)具有稀疏性(2)均匀采样密度可控性,计算开销可能不会太难以接受。
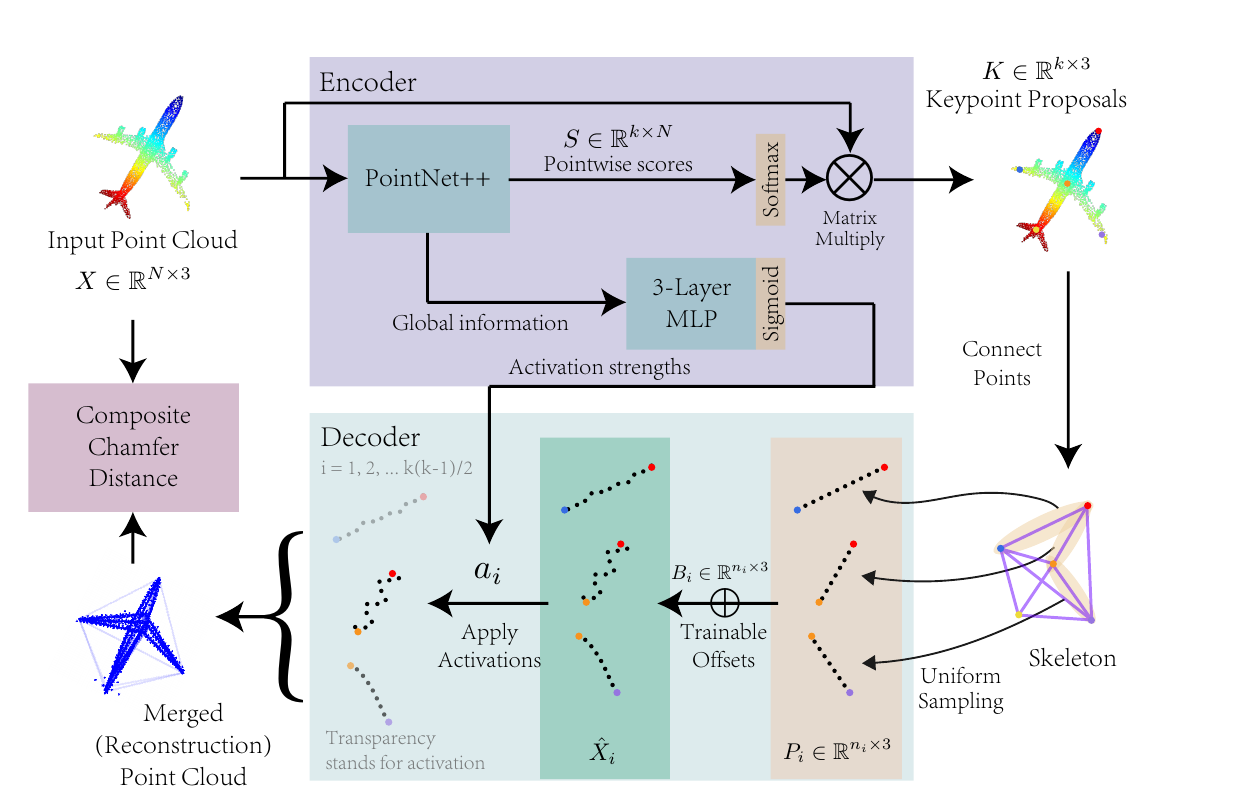
本文直接对key points形成的完全图进行重构,生成一个个的sub-cloud,但是由于有些边采样出的点,实际是不存在的,应该在其存在性上就予以抹杀(而非在offset学习阶段,强行将其拉回到某个位置),故作者引入了activation strength,每条边都将有一个对应的activation strength,相当于是边权,边权小的边对应的生成点在reconstruction过程中可能被丢弃,并且在loss计算过程中,也可能不会参与。
此外就是CCD误差函数的设计。CCD是Chamfer distance的一个扩展,Chamfer distance可以简单地将其理解成:最邻近点距离。在一个n维metric space中给定两个集合A,B,(比如)A中的某个点\(p_i\)到B中的最近点的距离,就是Chamfer distance。
在本问题中,集合A、B分别是生成点云与原始点云。但是需要注意,Chamfer distance是单向的,那么需不需要构建成双向对称的loss函数呢?答案是否定的,本问题本身就不是一个对称的问题。作者做了一个分类:
对每一个生成点云中的点\(p_i\),计算\(p_i\)在原始点云中的最近点\(q_i\),并且计算对应的Chamfer distance,使之最小化,这是在提升生成点云的fidelity(准确性),也就是说:生成点云的“大致形状”应该与原始点云类似。
对每一个原始点云中的点\(q_j\),计算\(q_j\)在生成点云中的最近点\(p_j\)。这就是不对称性的体现:即便生成点云每个点在原始点云上都有很好的对应点,由于生成点云可能具有稀疏性,反过来,原始点云的某些点可能没有办法在生成点云上找到很好的对应点。数学上来说,这就是:单射和满射。正向loss如果很小,只能保证生成点云的fidelity问题,能建立一个很好的 生成点云\(\rightarrow\)原始点云的单射,但是反过来,如果原始点云的每个点也能在生成点云上有很好的对应,那么可能可以建立一个原始点云\(\rightarrow\)生成点云的单射,使得 coverage问题得到解决。
正向fidelity loss很简单,就是这样: \[ \begin{equation}\label{fid} L_f=\sum_k a_k\sum_i\Vert p_i-q_i\Vert^2,q_i=\mathop{\arg\min}_{q}\Vert p_i-q_i\Vert \end{equation} \] 而反向coverage loss就没有那么简单了。首先,加入反向loss也如上式一样,定义成对称的,那么最终结果将会是:我直接让所有\(a_i\)训练成0得了,没有点存在,就没有loss!显然这是很有问题的。
一方面,我们希望\(a_i\) (activation strength)可以起到作用,另一方面我们又希望避免上述问题,我们也希望不会因为公式\(\eqref{fid}\)内部的\(a_i\)存在,使得\(a_i\)倾向于变小。作者提出了两个策略:
- 为了体现“coverage”,作者将会【一配多】,也就是说,不再寻找距离最小的一个点,而是:查到点\(q_i\)后,删除\(q_i\)来源的那条边(以及所有点),并且累加本边对应的activation strength到一个本地的(初始化为0的累加器)变量w上。如果w小于1,那就继续在剩余点中查找最小距离点,重复上述操作,直到w>1或者没有客用边。
- 假设已经没有可用边了,而w<1,则进行惩罚(说明我们让\(a_i\)学得太小了),在loss上增加\(\gamma (1-w)\),论文中\(\gamma\)选取20.0,比较大。
上述操作可以保证:\(a_i\)不会因为优化CCD而变得很小。
2.3 个人觉得存在的问题
2.3.1 稀疏性问题
作者如何重建其生成点云的呢?首先:根据图结构,每条边进行均匀采样。每条线段上有若干个点。此后使用一个网络进行offset学习。这样会存在一定问题:重建的点云可能就是很稀疏,导致CCD coverage loss计算总是比较大。比如:一个圆柱型的物体,在同一高度上,绕轴不同角度可能存在很多个点,但对于本论文的方法,一个高度上就一个点,那么对于圆柱型物体,只能使用螺旋式的offset,这会使得某些位置上比较稀疏。
要解决这个问题,可能可以在初始时同一个位置采样很多个点,之后使得这些点,在过本点,垂直图结构边的平面上扩散开来。我认为这样的话,学习的参数可以减少(每个点只需要学习一个参数而不是三个),也可以解决稀疏问题。
2.3.2 最邻近搜索
这只说下我的担忧:最邻近搜索快速吗?当然,可以使用一些加速的数据结构,比如8叉树,KD树等等,但是能有多快呢?不好说,我没有做过实验,但是这也就是非完全的生成式loss遇到的问题,loss构建时的稀疏性问题。所以个人认为,此处可以将最邻近loss换为别的loss。