2D LiDAR Simulator Release Notice
2D LiDAR Simulator V 1.0
2D LiDAR Simulator V 1.0🎇 is built upon the repository🎉🎉: Github🔗: Enigamtisms/Volume2D, which is, recently, updated. This simulator contains:
- map editor🎛 (with which you can build your own map),
- ROS integration🚀:
- rosbag generation without publishing
- rviz visualization for LaserScan, tf, Odometry (perturbed)
- Direct message publishing
- Easy-to-use👌 roslaunch parameter setting🗝 for simulated LiDAR and other perimeter settings.
- Fluent opencv-based keyboard / mouse control⌨🖱 with high FPS⏲, visualizing free space and scan.
Some demo pictures are shown as follows:
Dependencies
The implementations are done in Ubuntu 18.04, under some of the key libraries:
| Library name | Version |
|---|---|
| ROS | Melodic (for Ubuntu 18.04) |
| OpenCV | 3.x.x or above |
| Eigen | Usually bond with ROS |
For compilation, C++ 17 standards are recommended.
Download & Compile
In the repository Enigmatisms/LiDAR2DSim, click clone would suffice.
1 | git clone git@github.com:Enigmatisms/LiDARSim2D.git |
Usually, for a ROS package we can compile the code via
catkin_make. Yet, sometimes we want to compile A debug
version, i.e. -DCMAKE_BUILD_TYPE=DEBUG and a release
version at the same time for debugging convenience, therefore,
catkin_make might not be quick to use. I have written a
shell script named make.sh in the root directory, you can
thereby run:
1 | sudo chmod 777 ./make.sh |
This script receives two params (the second one is optional). The
former one declares the number of thread for compilation and the latter
one is for debug mode specification. make.sh is simply an
encapsulation of catkin_make.
Notice that if debug mode is on, cmake files will be output to folder
build_debug, devel thereby contains the
executable file of the most recent compilation (regardless of
compilation mode DCMAKE_BUILD_TYPE)
Run
Before run any of the code, make sure to:
1 | ~/LiDAR2DSim: source devel/setup.bash |
Otherwise, ROS package lidar_sim will not be found.
1. The Editor
Map editor is for the people who want to create their own maps. Run:
1 | roslaunch lidar_sim editor.launch |
You can find the param settings in
src/lidar_sim/launch/editor.launch
- map_name: specified output file name in folder
maps(mapsis in the root directory)
There are some other things to be noticed:
- The outer boundaries are given (30-pixel-thin), therefore don't draw anything in the border.
- Objects (Obstacles) are directional (all the points of each any one of the obstacles should be drawn in a anti-clockwise way)
- Press left button of the mouse to add a new point.
- Press
Eif one obstacle is drawn, and it will automatically enclose itself. - Press
Sto save the map and quit. - Press
Pto pop the points added, if the new points are empty, the enclosed objects will be popped. - Press
ESCto exit without saving the map.
2. Particle filter
This repository is once a repo for Particle filter, I implemented one simple particle filter for localization purposes. Therefore you can play with it.
This particle filter includes a 2D LiDAR simulator, which is based on the Volume2D Shader of mine[Github Repo: Enigmatisms/Volume]. Using this LiDAR simulator, I implemented an interesting little localization program via Particle Filter. The localization experiments are only done in a 2D-2DoF (translation position x and y) problem.
Under the condition of 2000 particles, the FPS of this algorithm is about 16-50 hz, and the convergence is fast and accurate. Run:
1 | roslaunch lidar_sim filter.launch |
To find out.
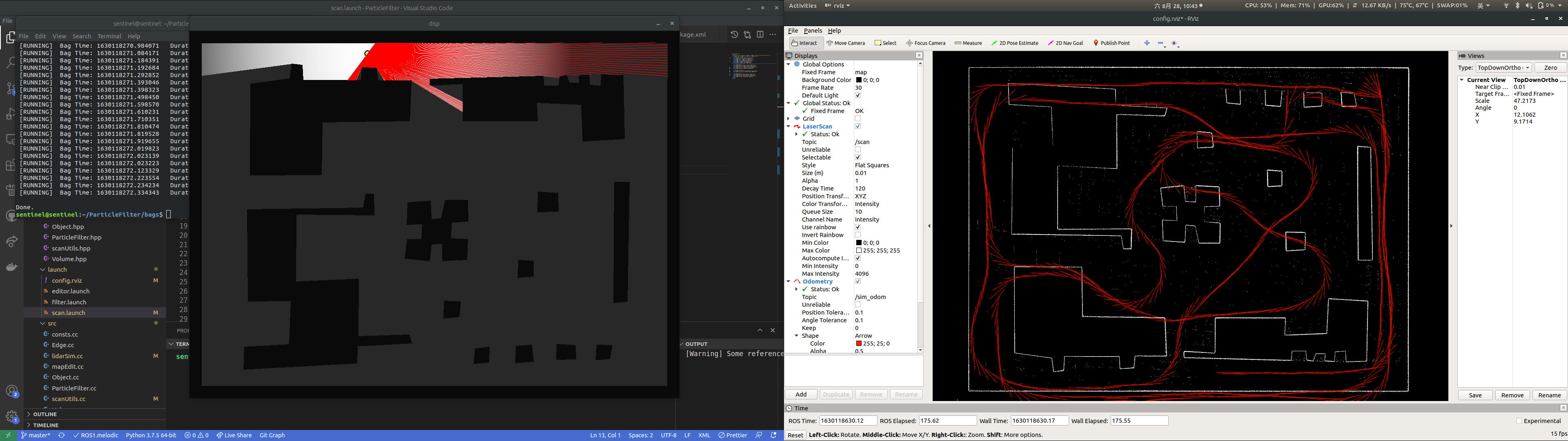
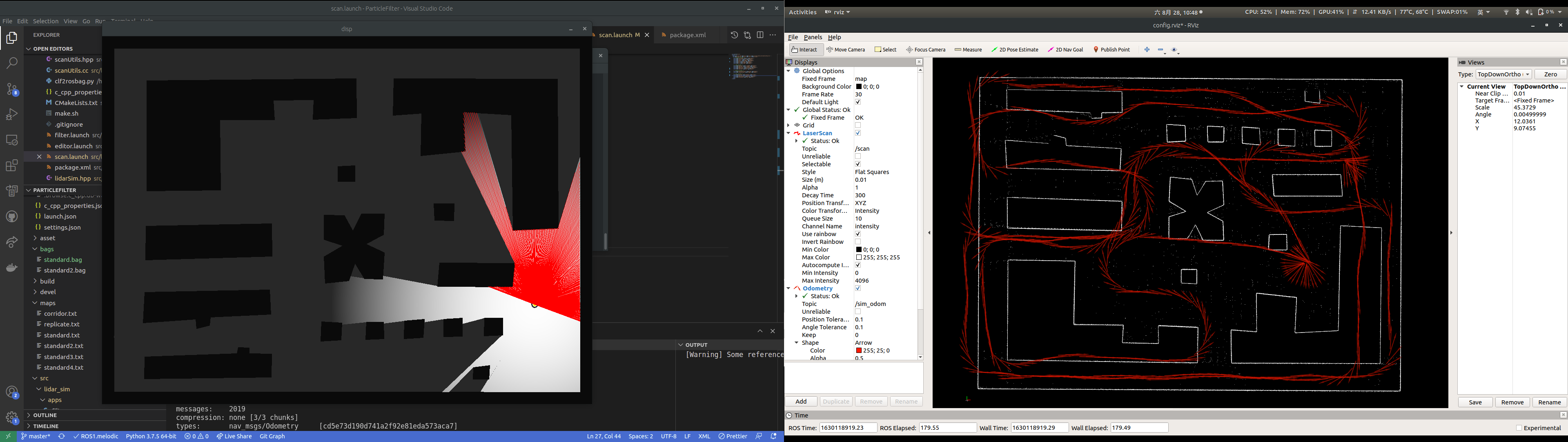
3. Scan simulator
The main content of this repo. Run:
1 | roslaunch lidar_sim scan.launch |
On initialization, two new windows will pop up:
- An opencv window for free space, LiDAR scan visualization and scanner controlling.
- An rviz window for sensor_msgs / nav_msgs visualization
Check the launch file, you can find a lot of params.
- Controller settings:
- trans_speed: translation speed (pixel per move, which is 2cm per move)
- rot_vel: rotation velocity, in degree, which is only available in keyboard control
- init_x, init_y: initial position of the scanner
- kp, ki, kd: PID parameters for mouse controller, which allows smooth control.
- LiDAR settings
- angle_min, angle_max: angle range in rad
- angle_incre: angle resolution (increment) in rad
- lidar_noise: noise level (gaussian sigma) for the noise in range.
- lidar_fps: frame rate of LiDAR
- Odometry settings: for nav_msgs::Odometry publishing
- translation_noise: translation noise level
- rotation_noise: rotation noise level (both gaussian)
- other settings:
- map_name: which map to run
- bag_name: the name of output rosbag
- skip_selection: if true, the program will not ask you to select the initial position of the scanner, (init_x, init_y) will come into use.
- direct_pub: publish the ROS messages in the program