特龙智慧-GMapping
特龙智慧
我在大二上学期购买了《概率机器人》一书,当时还没有学概率论,所以我看不懂(但是我大受震撼)。大二下的暑假曾经学了一段时间,但是没有深入,到第五章就结束了。直到现在,大四了,项目有这方面的需求了,才重新开始看特龙(Sebstian Thrun)这本口碑很好的书。尽管这本书是2006年出版的,其中的很多思想在现在的我看来,都还很有指导意义。非常后悔,自己没能在之前花精力啃下这本SLAM以及移动机器人著作。
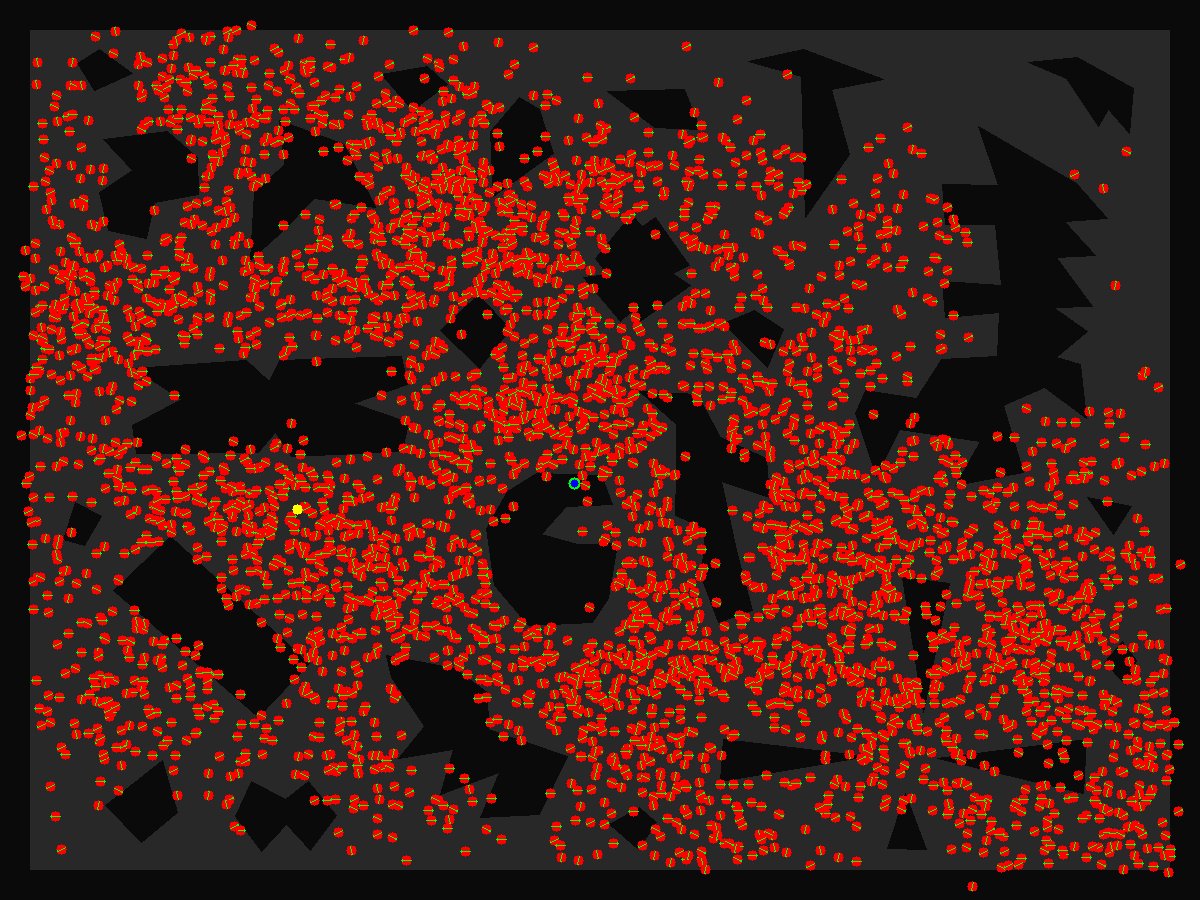
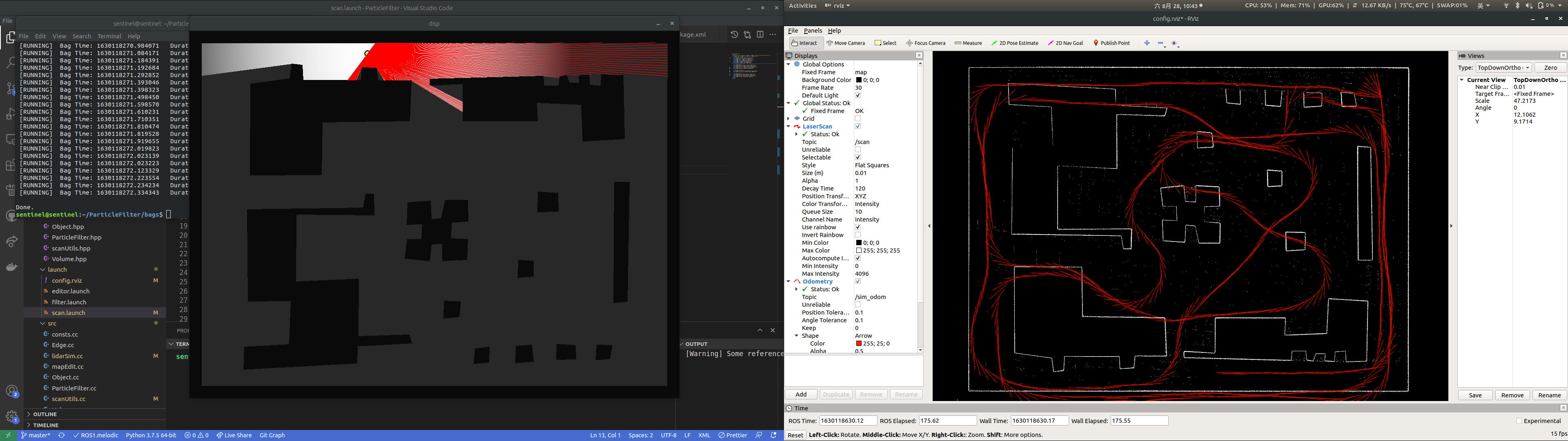
GMapping(以及相关的粒子滤波SLAM方法)或多或少都有他的参与,最近也刚好读了相关的论文,并且仔细研读了其代码(OpenSLAM上的💩山,literally),故我把这些笔记整理成了一篇文章:
- 本文作者并没有特龙,但是估计是相关团队的文章:Improved Techniques for Grid Mapping with Rao-Blackwellized Particle Filters
- 上面这篇论文可以说是:IROS2003:An Efficient FastSLAM Algorithm for Generating Maps of Large-Scale Cyclic Environments from Raw Laser Range Measurements的升级版(这篇论文的建议分布是“学”出来的)。